Project 5A: The Power of Diffusion Models!
"Leave the state that is well ordered and go to the state in chaos!"
—Chuang Tzu (Watson trans.)
Part 0: Setup
We obtain access to a pre-trained diffusion model (DeepFloyd IF). For this and all subsequent parts, we use random seed \(180\) for reproducibility.
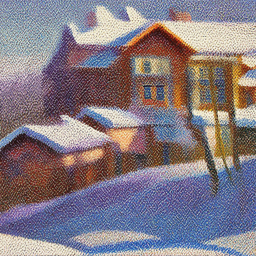
We sample from the model with three provided text prompts: an oil painting of a snowy mountain village, a man wearing a hat, and a rocket ship with various num_inference_steps values, and show the model outputs in Fig. 1.
We note that the perceived image quality generally improves with larger num_inference_steps.
| Prompt | \(5\) steps | \(10\) steps | \(20\) steps | \(40\) steps |
|---|---|---|---|---|
an oil painting of a snowy mountain village
|
|

|

|

|
a man wearing a hat
|

|

|

|

|
a rocket ship
|

|

|

|
|
Part 1: Sampling Loops
In this part, we implement different variations of sampling procedures that use the pre-trained denoiser model to generate images under different conditions.
Part 1.1. Implementing the forward process
We implement the forward process of diffusion, which just adds noise to an image \(x_0\):
\[x_t=\sqrt{\bar{\alpha_t}}x_0+\sqrt{1-\bar{\alpha_t}}\epsilon,\quad \epsilon\sim\mathcal{N}(0,1)\]
Where \(\bar{\alpha_t}\) is determined by the noise schedule. We show the results from the forward process on a test image for \(t\in[250,500,750]\) (Fig. 2).
| Original | \(t=250\) | \(t=500\) | \(t=750\) |
|---|---|---|---|

|

|

|

|
Part 1.2. Classical denoising
We attempt to remove noise by filtering with a Gaussian. We show the best results that we were able to obtain (with \(\sigma=11\)) in Fig. 3 (each column shows noisy \(\rightarrow\) blurred), but note that it is difficult to recover the original image, especially when noise levels area high.
| Original | \(t=250\) | \(t=500\) | \(t=750\) |
|---|---|---|---|
|
|
\(\rightarrow\)

|
\(\rightarrow\)

|
\(\rightarrow\)

|
Part 1.3. One-step denoising
We can also use the pre-trained denoiser model to estimate the noise present in the image and remove it appropriately. We show the results of this process in Fig. 4 (each column shows noisy \(\rightarrow\) one-step denoised).
| Original | \(t=250\) | \(t=500\) | \(t=750\) |
|---|---|---|---|
|
|
\(\rightarrow\)

|
\(\rightarrow\)

|
\(\rightarrow\)

|
Part 1.4. Iterative denoising
We can iteratively denoise the image by applying the noise estimation and removal process multiple times, following the formula below and a given noise schedule.
\[x_{t'}=\frac{\sqrt{\bar{\alpha_{t'}}\beta_{t}}}{1-\bar{\alpha_{t}}}x_0+\frac{\sqrt{\alpha_t}(1-\bar{\alpha_{t'}})}{1-\bar{\alpha_{t}}}x_t+v_{\sigma}\]
We show results for iterative denoising, as well as comparisons to the methods in previous parts, in Fig. 5. Indeed, iterative denoising produces a less blurry image than one-step denoising.
| \(t=690\) | \(t=540\) | \(t=390\) | \(t=240\) | \(t=90\) | Iterative denoised (\(t=0\)) | Original | One-step denoised | Gaussian blurred |
|---|---|---|---|---|---|---|---|---|

|

|

|

|

|

|
|

|

|
Part 1.5. Diffusion model sampling
We can generate images by running the iterative denoising procedure starting from pure noise (the largest time point). Some results are shown below in Fig. 6.
| Sampled images |
|---|





|
Part 1.6. Classifier-free guidance
We can improve the quality of our generated images by implementing classifier-free guidance, where we compute two noise estimates (one conditional and one unconditional) and use the linear combination
\[\epsilon=\epsilon_u+\gamma(\epsilon_c-\epsilon_u)\]
Where \(\gamma\) is a scalar parameter. We show the results of this process in Fig. 7 for \(\gamma=7\).
| Sampled images |
|---|





|
Part 1.7. Image-to-image translation
We can edit images by adding noise to them and then denoising them. We show the results of this process in Fig. 8 with different amounts of noise added (the index \(i\) that we use corresponds to that in strided_timesteps=range(990,-1,-30)).
| Legend | i=1 |
i=3 |
i=5 |
i=7 |
i=10 |
i=20 |
Original |
|---|---|---|---|---|---|---|---|
campanile
|

|

|

|

|

|

|
|
taj
|

|

|

|

|

|

|

|
gugong
|

|

|

|

|

|

|

|
Part 1.7.1. Editing hand-drawn and web images
Similarly, we can perform the above procedure on non-realistic images. Examples are shown in Fig. 9.
| Legend | i=1 |
i=3 |
i=5 |
i=7 |
i=10 |
i=20 |
Original |
|---|---|---|---|---|---|---|---|
camera
|

|

|

|

|

|

|

|
taj
|

|

|

|

|

|

|

|
gugong
|

|

|

|

|

|

|

|
Part 1.7.2. Inpainting
We can also use CFG to inpaint images, by forcing the image to be unambiguous outside the edit mask region:
\[x_t\leftarrow mx_t + (1-m)]\text{forward}(x_{\text{orig}},t)\]
We show the results of this process in Fig. 10.
| Legend | Original | Mask | Inpainted |
|---|---|---|---|
campanile
|
|

|

|
taj
|
|

|

|
bridge
|

|

|

|
Part 1.7.3. Text-conditional image-to-image translation
We can condition on a text prompt during SDEdit to generate hybrid images between the prompt and the original image. We show the results of this process in Fig. 11, where the text prompt is a rocket ship.
| Legend | i=1 |
i=3 |
i=5 |
i=7 |
i=10 |
i=20 |
Original |
|---|---|---|---|---|---|---|---|
campanile
|

|

|

|

|

|

|
|
taj
|

|

|

|

|

|

|
|
gugong
|

|

|

|

|

|

|
|
Part 1.8. Visual anagrams
We can generate visual anagrams by averaging noise estimates from different text prompts appropriately. We show the results of this process in Fig. 12.
| Upright | Flip |
|---|---|

an oil painting of people around a campfire
|

an oil painting of an old man
|

a man wearing a hat
|

a photo of a dog
|

an oil painting of a snowy mountain village
|

a photo of the amalfi cost
|
Part 1.9. Hybrid images
We can generate hybrid images by filtering noise estimates from different text prompts and taking the sum. We show the results of this process in Fig. 13.
| Hybrid | Low Pass | High Pass |
|---|---|---|

|

a lithograph of a skull
|

a lithograph of waterfalls
|

|

a lithograph of a skull
|

a photo of a dog
|

|

a photo of a dog
|

an oil painting of people around a campfire
|